acessar com ww.ebanataw.com.br/arduino/expmotorshield.htm
|
|
ESTUDANDO O MUNDO ARDUINO:E ANTECIPANDO O FUTURO: |
|
| Motor Shield | ||
|
acessar com ww.ebanataw.com.br/arduino/expmotorshield.htm |
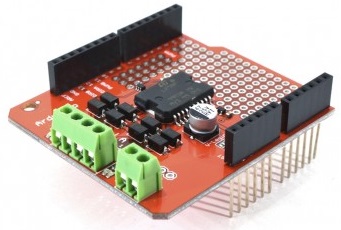
O Motor Shield é um shield que possibilita a ligação de motores e outros dispositivos elétricos de alta potência.
// Programa: Arduino Motor Shield - Controle motores DC
// Autor: Arduino e Cia
// carrega a biblioteca AFMotor
#include <AFMotor.h>
// Define o motor1 ligado a
conexao 1
AF_DCMotor
motor1(1);
// Define o motor2 ligado a
conexao 4
AF_DCMotor
motor2(4);
void
setup()
{
// Define a velocidade maxima
para os motores 1 e 2
motor1.setSpeed(255);
motor2.setSpeed(255);
}
void
loop()
{
// Aciona o motor 1 no sentido
horario
motor1.run(FORWARD);
// Aciona o motor 2 no sentido
anti-horario
motor2.run(BACKWARD);
// Aguarda 5 segundos
delay(5000);
// Desliga os 2 motores
motor1.run(RELEASE);
motor2.run(RELEASE);
// Aciona o motor 1 no sentido
anti-horario
motor1.run(BACKWARD);
// Aciona o motor 2 no sentido
horario
motor2.run(FORWARD);
// Aguarda 5 segundos
delay(5000);
// Desliga os 2 motores
motor1.run(RELEASE);
motor2.run(RELEASE);
}
OUTRO EXEMPLO:
/* Ardumoto Example Sketch
by: Jim Lindblom
date: November 8, 2013
license: Public domain. Please use, reuse, and modify this
sketch!
Adapted to v20 hardware by: Marshall Taylor
date: March 31, 2017
Three useful functions are defined:
setupArdumoto() -- Setup the Ardumoto Shield pins
driveArdumoto([motor], [direction], [speed]) -- Drive [motor]
(0 for A, 1 for B) in [direction] (0 or 1) at a [speed]
between 0 and 255. It will spin until told to stop.
stopArdumoto([motor]) -- Stop driving [motor] (0 or 1).
setupArdumoto() is called in the setup().
The loop() demonstrates use of the motor driving functions.
*/
// Clockwise and counter-clockwise definitions.
// Depending on how you wired your motors, you may need to swap.
#define FORWARD 0
#define REVERSE 1// Motor definitions to make life easier:
#define MOTOR_A 0
#define MOTOR_B 1
// Pin Assignments //
//Default pins:
#define DIRA 2 // Direction control for motor A
#define PWMA 3 // PWM control (speed) for motor A
#define DIRB 4 // Direction control for motor B
#define PWMB 11 // PWM control (speed) for motor B
////Alternate pins:
//#define DIRA 8 // Direction control for motor A
//
#define PWMA 9 // PWM control (speed) for motor A
//
#define DIRB 7 // Direction control for motor B
//
#define PWMB 10 // PWM control (speed) for motor B
void
setup(){
setupArdumoto(); // Set all pins as outputs
}
void loop()
{
// Drive motor A (and only motor A) at various speeds, then stop.
driveArdumoto
(MOTOR_A, REVERSE, 255); // Set motor A to REVERSE at maxdelay
(1000); // Motor A will spin as set for 1 seconddriveArdumoto
(MOTOR_A, FORWARD, 127); // Set motor A to FORWARD at halfdelay
(1000); // Motor A will keep trucking for 1 secondstopArdumoto
(MOTOR_A); // STOP motor A// Drive motor B (and only motor B) at various speeds, then stop.
driveArdumoto
(MOTOR_B, REVERSE, 255); // Set motor B to REVERSE at maxdelay
(1000); // Motor B will spin as set for 1 seconddriveArdumoto
(MOTOR_B, FORWARD, 127); // Set motor B to FORWARD at halfdelay
(1000); // Motor B will keep trucking for 1 secondstopArdumoto
(MOTOR_B); // STOP motor B// Drive both
driveArdumoto
(MOTOR_A, FORWARD, 255); // Motor A at max speed.driveArdumoto
(MOTOR_B, FORWARD, 255); // Motor B at max speed.delay
(1000); // Drive forward for a second// Now go backwards at half that speed:
driveArdumoto
(MOTOR_A, REVERSE, 127); // Motor A at max speed.driveArdumoto
(MOTOR_B, REVERSE, 127); // Motor B at max speed.delay
(1000); // Drive forward for a second// Now spin in place!
driveArdumoto
(MOTOR_A, FORWARD, 255); // Motor A at max speed.driveArdumoto
(MOTOR_B, REVERSE, 255); // Motor B at max speed.delay
(2000); // Drive forward for a secondstopArdumoto
(MOTOR_A); // STOP motor AstopArdumoto
(MOTOR_B); // STOP motor B
}
// driveArdumoto drives 'motor' in 'dir' direction at 'spd' speed
void
driveArdumoto(byte motor, byte dir, byte spd)
{
if (motor == MOTOR_A)
{
digitalWrite(DIRA, dir);
analogWrite
(PWMA, spd);
}
else if (motor == MOTOR_B)
{
digitalWrite(DIRB, dir);
analogWrite
(PWMB, spd);
}
}
// stopArdumoto makes a motor stop
void
stopArdumoto(byte motor){
driveArdumoto(motor, 0, 0);
}
// setupArdumoto initialize all pins
void
setupArdumoto(){
// All pins should be setup as outputs:
pinMode
(PWMA, OUTPUT);pinMode
(PWMB, OUTPUT);pinMode
(DIRA, OUTPUT);pinMode
(DIRB, OUTPUT);// Initialize all pins as low:
digitalWrite
(PWMA, LOW);digitalWrite
(PWMB, LOW);digitalWrite
(DIRA, LOW);digitalWrite
(DIRB, LOW);}
|
|
NOTA: Este site é mantido pela equipe do engenheiro Roberto Massaru Watanabe e se destina principalmente para adolecentes e estudantes. Pelo caráter pedagógico do site, seu conteúdo pode ser livremente copiado, impresso e distribuido. Só não pode piratear, isto é, copiar e depois divulgar como se fosse de sua autoria.
ET-18\RMW\arduino\expmotorshield.htm em 06/01/2020, atualizado em 06/01/2020 .